资讯
跳转
定位中
热门城市:
北京
上海
广州
深圳
杭州
南京
电动邦用户
退出
登录
31.99万元起,阿维塔11单电机版上市
猛士M-Terrain概念车静态解析
魅族的底气从而何来?
顶配的熊猫mini也值回票价
推荐
新车
导购
试驾
用车
技术
政策
行业
理想『高铁』之后,LEVC又推『空客』,纯电MPV你就卷吧
迈入电气化时代之后,LEVC选择转型入局从头再来,2024年其迎来了自己的第一款全球纯电车型——L380,投身该细分市场的争夺。
LEVC
L380
15.49万元起,新款smart精灵#1及#3上市,400km版本值不值得入手?
门槛更低的smart,值不值得“入群”?
smart
精灵#1
全新天舆架构发布,宝骏悦也PLUS加入悦也家族
悦也PLUS延续了悦也的热度,在保留了其潮流乐趣属性的基础上,为我们扩展出了一款更加实用和面向家庭用户的产品,在好玩的同时也能满足不少家庭出行的需求。
宝骏
悦也
从智界S7看华为不造车:越做越明白
走对每一步,比走好每一步更重要;走稳每一步,比大跨步更有前(钱)途
智界S7
鸿蒙智行
鸿蒙系统
华为
鸿蒙生态
7.98万元起,长安启源A05/Q05真香版上市,最大综合续航达1300km!
这一次长安启源拿出的诚意着实不小,了解新能源汽车价格的朋友应该能感受到这个力度了。
长安
启源
指导价100.8-199.8万元,新款保时捷Taycan上市,WLTP续航最高693km!
保时捷每卖出8台车,就有1台是Taycan。
保时捷
Taycan
年轻人的首款“都市微电卡丁车”!吉利熊猫卡丁亮相
作为熊猫家族的“潮酷担当”,全新亮相的熊猫卡丁将进一步拓展都市出行新场景,引领都市潮玩新风尚,成为最具驾驶乐趣的微型电车。
吉利
熊猫卡丁
蟹行模式、固态电池、无图智驾!预售23万元起智己L6『重装』入场
4月8日,智己汽车旗下的第四款车型——纯电中型轿车智己L6正式开启预售,官方指导价格为23-33万元,价格方面继续沿用了智己LS6已见成效的打法。
智己
智己L6
3月新能源车企销量遍地开花,比亚迪月销30万+继续霸榜
不出意外的是,在前十榜单中,比亚迪3月份的销量能抵其他车企的总和
比亚迪
新能源
交付量出炉后,我们再聊理想MEGA
借着公布数据的节点,我们再聊聊这款引发诸多讨论的纯电MPV——理想MEGA
理想
MEGA
理想MEGA
小米SU7入局,卷动加剧,4月AITO问界/小鹏/极氪纷纷推出限时优惠
如果说特斯拉一枪打响了2023价格战,那么小米SU7无疑是2024年的价格战敲钟人了。
小米
小米SU7
华为
将诚意进行到底,全新腾势N7上市23.98万起
这次的上市,腾势N7的策略可以说是全方位的,不仅仅是在价格上给出了极大的诚意,同时伴随着诸多配置升级和标配、购车和置换权益的补贴,从多方面打动消费者。
腾势
N7
纯电Macan将于北京车展正式上市,『触电』后的惊喜值得期待
近日,保时捷官方公布,旗下全新纯电动Macan将于4月下旬的北京车展正式上市,首发两款车型为纯电动Macan 4和纯电动Macan Turbo。
保时捷
纯电Macan
10.99-12.99万元,奇瑞风云A8远航版上市
3月30日,奇瑞风云A8远航版(下称「A8远航版」)正式上市,新车共计推出3款车型,售价为10.99-12.99万元。
奇瑞
风云A8
6.99万元起,江淮钇为3挚爱版正式上市,最高续航505km!
钇为3挚爱版正式上市,新车共推出7款车型,官方续航分为330/405/505km三个版本,官方指导价为6.99-12.79万元。
江淮
钇为3
26.58万元起,2024新款阿维塔12上市,全系标配三激光雷达+800V平台!
仅在上市不足半年时间的时间下,为了适应瞬息万变的市场节奏,阿维塔这效率也真算是拼了。
阿维塔
12
21.59万起售,700km续航起步,小米SU7用27分钟跟5万人成为朋友
小米汽车首发选手,SU7一定要稳扎稳打
小米SU7
新车上市
小米汽车
轴距3米带空悬,爬山涉水去游玩!首试奇瑞星途星纪元ET
本次试驾就不对外观过多解读了。当时这台车就带给了我们不小的惊喜,没想到一个月后的试驾体验,星纪元ET再次突破了我们对这台车的认知。
星途
星纪元ET
奇瑞
可插混可增程!全系标配L2级智驾,11.79万元起的长安UNI-Z来了
3月28日,长安UNI系列的第四款车型——长安UNI-Z正式上市,新车定位为A级SUV。此次共发布3款配置,官方指导价11.79-13.19万元。
长安
UNI-Z
号称“全球车、中国舱”,试驾广汽丰田第九代凯美瑞!
丰田混动所追求的节油、轻量化、高效率从未改变。
丰田
混动
凯美瑞
理想『高铁』之后,LEVC又推『空客』,纯电MPV你就卷吧
迈入电气化时代之后,LEVC选择转型入局从头再来,2024年其迎来了自己的第一款全球纯电车型——L380,投身该细分市场的争夺。
LEVC
L380
15.49万元起,新款smart精灵#1及#3上市,400km版本值不值得入手?
门槛更低的smart,值不值得“入群”?
smart
精灵#1
全新天舆架构发布,宝骏悦也PLUS加入悦也家族
悦也PLUS延续了悦也的热度,在保留了其潮流乐趣属性的基础上,为我们扩展出了一款更加实用和面向家庭用户的产品,在好玩的同时也能满足不少家庭出行的需求。
宝骏
悦也
从智界S7看华为不造车:越做越明白
走对每一步,比走好每一步更重要;走稳每一步,比大跨步更有前(钱)途
智界S7
鸿蒙智行
鸿蒙系统
华为
鸿蒙生态
7.98万元起,长安启源A05/Q05真香版上市,最大综合续航达1300km!
这一次长安启源拿出的诚意着实不小,了解新能源汽车价格的朋友应该能感受到这个力度了。
长安
启源
指导价100.8-199.8万元,新款保时捷Taycan上市,WLTP续航最高693km!
保时捷每卖出8台车,就有1台是Taycan。
保时捷
Taycan
年轻人的首款“都市微电卡丁车”!吉利熊猫卡丁亮相
作为熊猫家族的“潮酷担当”,全新亮相的熊猫卡丁将进一步拓展都市出行新场景,引领都市潮玩新风尚,成为最具驾驶乐趣的微型电车。
吉利
熊猫卡丁
蟹行模式、固态电池、无图智驾!预售23万元起智己L6『重装』入场
4月8日,智己汽车旗下的第四款车型——纯电中型轿车智己L6正式开启预售,官方指导价格为23-33万元,价格方面继续沿用了智己LS6已见成效的打法。
智己
智己L6
小米SU7入局,卷动加剧,4月AITO问界/小鹏/极氪纷纷推出限时优惠
如果说特斯拉一枪打响了2023价格战,那么小米SU7无疑是2024年的价格战敲钟人了。
小米
小米SU7
华为
将诚意进行到底,全新腾势N7上市23.98万起
这次的上市,腾势N7的策略可以说是全方位的,不仅仅是在价格上给出了极大的诚意,同时伴随着诸多配置升级和标配、购车和置换权益的补贴,从多方面打动消费者。
腾势
N7
纯电Macan将于北京车展正式上市,『触电』后的惊喜值得期待
近日,保时捷官方公布,旗下全新纯电动Macan将于4月下旬的北京车展正式上市,首发两款车型为纯电动Macan 4和纯电动Macan Turbo。
保时捷
纯电Macan
10.99-12.99万元,奇瑞风云A8远航版上市
3月30日,奇瑞风云A8远航版(下称「A8远航版」)正式上市,新车共计推出3款车型,售价为10.99-12.99万元。
奇瑞
风云A8
6.99万元起,江淮钇为3挚爱版正式上市,最高续航505km!
钇为3挚爱版正式上市,新车共推出7款车型,官方续航分为330/405/505km三个版本,官方指导价为6.99-12.79万元。
江淮
钇为3
26.58万元起,2024新款阿维塔12上市,全系标配三激光雷达+800V平台!
仅在上市不足半年时间的时间下,为了适应瞬息万变的市场节奏,阿维塔这效率也真算是拼了。
阿维塔
12
21.59万起售,700km续航起步,小米SU7用27分钟跟5万人成为朋友
小米汽车首发选手,SU7一定要稳扎稳打
小米SU7
新车上市
小米汽车
可插混可增程!全系标配L2级智驾,11.79万元起的长安UNI-Z来了
3月28日,长安UNI系列的第四款车型——长安UNI-Z正式上市,新车定位为A级SUV。此次共发布3款配置,官方指导价11.79-13.19万元。
长安
UNI-Z
号称“全球车、中国舱”,试驾广汽丰田第九代凯美瑞!
丰田混动所追求的节油、轻量化、高效率从未改变。
丰田
混动
凯美瑞
最高续航401km,搭载CTB一体化技术,9.68万起售的元UP正式上市
元UP与元PLUS组成“新·双子星”,征战小型纯电SUV市场
比亚迪
元UP
新车上市
从「新世代概念车」,看宝马在2025年如何玩转电动化
宝马凭借智能电动化,持续为用户提供有趣、先锋、可持续发展的产品
宝马
新世代概念车
新世代X概念车
试驾哈弗二代大狗Hi4!从城市到越野,性能与能耗完美兼顾
哈弗大狗车如其名,那双深情而圆圆的头灯基本让人过目不忘
哈弗
二代大狗
交付量出炉后,我们再聊理想MEGA
借着公布数据的节点,我们再聊聊这款引发诸多讨论的纯电MPV——理想MEGA
理想
MEGA
理想MEGA
10万级!电动方盒子!这届年轻人会懂iCAR 03吗?
iCAR 03率先抢占了最有活力的市场,它的特长能被大家接受吗?
奇瑞
iCAR
iCAR03
新车
2024款「全家桶」出炉,“冷静卷”的零跑更可怕
这次零跑的策略不再是单纯的“卷价格”,而是给消费者更加轻松的购车选择。
零跑
C11
C01
C10
T03
三款纯电轿车先后“更新换代”,配置价格一起卷
三款纯电轿车更新换代,率先开卷
深蓝SL03
智己L7
极氪001
新车
家用SUV谁更强?比元PLUS更具竞争力的哪吒X来了
随着智能电动化的普及,以哪吒X为代表的“品质派”将更有竞争力。
哪吒X
元PLUS
导购
已成“热门”的问界M9,能否像理想L9一样「热销」?
我们还是想拿问界M9跟目前大型SUV市场的“销冠”——理想L9做个比较,看看它到底有没有“掀宝座”的能力。
理想L9
问界M9
新车
导购
“衣锦还乡”的MG4 EV,给全球车型打了个样
在海外畅销的中国车,在国内更加能够受到格外的礼遇。
名爵
MG4
12.18万元起,上汽荣威D7强势入场,比亚迪不香了
『以技术立足,用实力说话』的上汽荣威,凭借『D家族』首款车型荣威D7,拉开了重返新能源市场D-Day战役,这次真能『不鸣则已一鸣惊人』吗?
荣威D7
上汽荣威
荣威D7
DMH
11.28万元起售,是什么让别克新微蓝6「勇敢下探」?
这样贴着12万以内的定价策略,即便是很多国内自主品牌的紧凑级纯电车型都不敢如此大胆。
别克
新微蓝6
想找辆朴实可靠的纯电轿车,不妨来看看这辆bZ3
让车回归更快、更舒适、更安全地带着我们抵达目的地,这是一汽丰田bZ3「返璞归真」的宝贵之处。
一汽丰田
bZ3
导购
家用车
奥迪e-tron GT:新世代的自信掌控力
这种超脱于日常柴米油盐的自由,更是难能可贵。所以拥有这种气质的奥迪e-tron GT,很难不为它动心。
奥迪
e-tron
GT
纯电GT跑车
真金不怕火炼!AITO问界M5 智驾版双智性能极限挑战
懂车帝极限夏测是以最严苛及严谨的测试机制,终结部分车型“神话”的同时,也让一款智能王牌车型浮出水面,它就是问界M5纯电后驱智驾版。
AITO问界
问界M5
智驾版
问界M5
又到暑期带娃时,不如开这几款大六座新能源车型来趟全家自驾游
2+2+2的六座布局考虑的是能够给两位小朋友相对独立的二排乘坐空间,这样既能比较安全,同时也方便父母照顾;而增程或插混则考虑到了可油可电的补能灵活性
蓝山DHT-PHEV
问界M7
理想L8
腾势D9
看似“小众”,实则满足“大众”,宝骏悦也能达到怎样的高度?
虽然宝骏悦也张了一个“特型脸”,看上去是为了满足消费者个性化需求打造的小车,但对于宝骏品牌来说,悦也所承担的重任和希望,远比“征服小众市场”要更大。
宝骏
悦也
新车
21万买纯电SUV,别克E4和小鹏G6该怎么选?
别克E4臻享版和小鹏G6 580长续航Pro这两款车究竟能不能打?
别克E4
小鹏G6
锐歌/ES7/Model Y,这三款智能纯电SUV到底应该怎么选?
当我们把上面这些分析和结论分享给小田之后,他虽然表示仍然需要再去店里实际体验和感受一下实车之后在做决定,但明显已经对锐歌和ES7倾心不少,特别是四驱版本的锐歌
蔚来ES7
特斯拉
Model
Y
凯迪拉克
锐歌
高考开战,哪台车能让考生好好午休一下?
就没有什么办法,能解决一下考生午休难的问题吗?
零重力座椅
新能源
上市首月销量超1.6万台,五菱缤果掌握了什么「爆款密码」?
五菱只需要一个缤果“单打”,得分就能在「新品牌、新势力」中排名第三,只要宏光MINIEV月销能达到1万台,那凭借两款车超过理想汽车,也并不是梦。
五菱汽车
缤果
导购
尝鲜换购还是继续用?三款新势力经典车型「平替」攻略
今天我们就以「蔚来ES6」、「小鹏P7」以及「极氪001」三款车型的官方二手车价格为标准,看看用相同预算能「平替」买到什么样的新车
蔚来ES6
小鹏P7
极氪001
导购
猎跑更有范儿!电动邦看车团上海车展邂逅腾势N7
4月22日,电动邦携手20名热爱新能源汽车的粉丝们,前往品鉴腾势汽车的全新的纯电猎装SUV——腾势N7。
腾势
腾势N7
轴距3米带空悬,爬山涉水去游玩!首试奇瑞星途星纪元ET
本次试驾就不对外观过多解读了。当时这台车就带给了我们不小的惊喜,没想到一个月后的试驾体验,星纪元ET再次突破了我们对这台车的认知。
星途
星纪元ET
奇瑞
高速NZP略保守,内饰大升级,试驾全新极氪001
此次试驾,我们就带大家着重体验下新老极氪001所带来的那些变化。
极氪
极氪001
驾乘双修,动静皆宜,这样的宝马i5怎能不爱
相信这样一款售价不到50万的“大宝马”,将成为冲击细分市场冠军的热门车型。
宝马
i5
试驾
40万左右的合创V09怎么样?动静皆宜,值回票价
如果您在找一款品质还不错的40万价位MPV车型,我们觉得可以给合创V09一次机会。
合创
合创V09
试驾
值得回味和大胆探索,这就是ID.7 VIZZION的乐趣所在
要是找“锦上添花”的车,一汽大众ID.7 VIZZION就很典型
一汽-大众
ID.7
VIZZION
新车
对标欧洲小钢炮,MG4 EV要做10万级操控『天花板』?
今天我们就来看看,一台10万级的小车,是如何让欧洲人为之痴迷的。
MG
MG4
EV
听着很暴力,开着很舒适!智己LS6道路+静态深度体验
有朋友担心,开着这样一台暴躁的车上路,会不会怕有些hold不住,悬挂会不会太硬,坐起来太颠,本期电动邦道路+静态深度体验给到你答案。
智己
智己LS6
抢鲜试驾易至EV3青春版,新车已开启9.9/499元盲订
在纯电动汽车市场日益升温的新环境里,江铃也很期待这款车型能有好于此前的销量表现。
江铃新能源
易至EV3
蔚来手机行不行?NIO Phone首发深度体验
作为一台专门为车打造的手机,NIO Phone到底能不能带给车主『移动互联全新体验』,会不会仅仅是『豪华车钥匙』,一起来看今天的首发深度体验。
蔚来
蔚来手机
15万级遥遥领先!宝骏云朵「灵犀智驾2.0」首试
没想到,一台大概率售价不足15万的车,竟然让我有了超越30万级别的智驾体验。
宝骏
宝骏云朵
四座智能亲子车,极狐汽车考拉难道只会当“保姆”?
所以极狐考拉可不只是一款简单的“保姆”车,它也能是一款可靠的通勤车,富有驾驶乐趣的纯电小车,以及“多拉快跑”的多用途车型。
极狐
考拉
新车
试驾
能省也能躁的第四代i-MMD,场地&道路试驾广汽本田双子星
今天,我们就来体验体验皓影e:PHEV及全新雅阁e:PHEV,看看它们表现如何。
本田
PHEV
试驾江淮首款插混车型QX PHEV,路感十足,综合续航1300km!
一直以来,江淮的新能源路线基本锚定在纯电动领域,不过最近,江淮的首款插电混动车型终于来到了我们面前。
江淮QX
PHEV
混动
除了全铝平台,这台预售价不到15万的纯电中型SUV还有啥?
舒适宽敞的座舱,多样化风格的行驶质感,仍在预售的奇瑞eQ7,不可忽视
奇瑞新能源
奇瑞eQ7
新车
动力细腻+座舱高级,这样的海豹DM-i能扮演什么角色?
海豹DM-i这款车,除了全家用车可以考虑它以外,或许企业也能考虑采购一批,用作公务出行?也是个不错的选择。
比亚迪
海洋网
海豹DM-i
新车
试驾
纯电150km+馈电油耗4.6L,宋PLUS DM-i冠军版够不够香?
一款产品只分为外表和内在,而比亚迪销量狂飙的秘诀,主要就是提升产品的外表和内在。
比亚迪
宋PLUS
「稳重若氢」的满满高级感,第二代丰田MIRAI适合谁?
这款中大型FCV轿车带来的是「高级」的用车体验,包括更平稳和信心十足的驾驶体验,更舒适安逸的乘坐体验,再加上完全零碳排放,只排水,非常适合注重环保的成功人士当作自己的行政用车。
广汽丰田
MIRAI
试驾
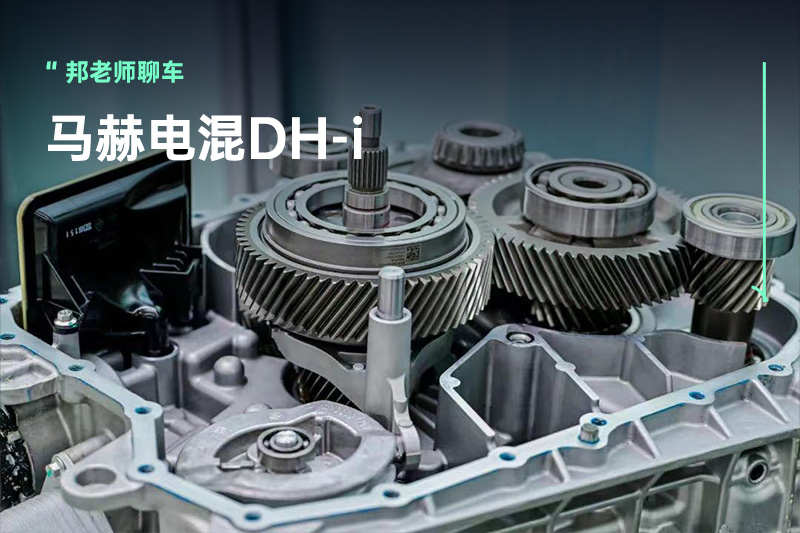
“火箭少年”?抢鲜试驾东风风神皓瀚·马赫电混DH-i
近期东风风神推出的皓瀚·马赫电混DH-i拿出了比上综艺更狠的招数,它直接“上火箭”了
东风风神
皓瀚·马赫
征服赛道,征服风,路特斯Eletre如何成为一款「爱不释手」的纯电SUV
将“传统艺能”和“次时代新技术”完美融合的,路特斯Eletre绝对算是标杆
路特斯
Eletre
试驾
像「约老师」的全新ES8,将成为蔚来持续争夺豪华市场的“建队核心”
就是这样一款「约老师」级的中大型纯电SUV,能否成为蔚来赢得更多高端豪华市场的“建队核心”?我觉得可以,但实际效果如何,还需要市场来检验。
蔚来
新车
全新ES8
高合HiPhi Y迎来首次OTA,新增转向灯自动变道、自定义ISD等功能
咱先简单速览一下HiPhi Y,然后给您介绍介绍这次OTA的升级内容。
高合
HiPhi
Y
极速240+km/h碾压同级,对于普通用户有何意义?
将一台电混的家用SUV做到这么高的极速,究竟是为什么呢?
吉利
银河
吉利银河L7
飞凡汽车全新OTA,舒适体验升级,「光维感知建模技术」提升智驾表现
古话说酒香不怕巷子深,不过在当前的信息化时代当中,酒香最怕的就是巷子深。
飞凡汽车
OTA
年中盘一盘,新能源车企们还缺什么样的产品?
新能源车型品类还有“死角”吗?不如大家一起来找茬!
比亚迪
新能源
和“应试教育”说拜拜,理想汽车安全日揭秘「堡垒安全车身」!
尽管堡垒这个词被广泛运用在豪华型SUV上面,不过再用一次也无妨。
理想汽车
L8
海豹续航挑战赛成绩出炉!全体续航达成率超80%,冠军达93.47%!
夺得冠军的车型正是一台650KM四驱性能版车型,续航达成率达到了93.47%;前4名选手的续航达成率也都达到了90%以上。
海豹
续航挑战赛
低温真续航,引「豹」真实力!比亚迪海豹续航挑战赛等你来战!
精彩赛制,福利多多!比亚迪海豹续航挑战赛即将于2月25日正式开幕,海豹车主朋友们快快来报名参赛吧!
海豹
续航挑战赛
从“黑历史”到安全先驱,梅赛德斯-奔驰都做了哪些努力?
时至今日,奔驰对于安全的定义历经无数次进化,来到了新的高度。
奔驰
自动紧急制动
国补保价也要“卷”?比亚迪、吉利等车企保价政策大汇总!
不算不知道,一算吓一跳,新能源汽车国家补贴已经经历了13个年头。
比亚迪
国家补贴
奔驰EQE/EQS等车型降价,最高降价幅度达23万元!
为了提升产品竞争力,奔驰似乎是时候进行一些调整了。
奔驰
EQ
迄今为止“最强”版本,比亚迪汉DiPilot智能驾驶辅助系统体验
比亚迪汉DM-i搭载的最新版本DiPilot系统相比之前有了巨大的进步,智能领航系统功能更加完善,称之为比亚迪有史以来“最强”的辅助驾驶系统也不为过。
比亚迪
汉DM
智能驾驶
因冷却液渗漏,北京奔驰扩大召回部分EQA、EQB和EQC车型
近日,北京奔驰汽车有限公司(以下简称北京奔驰)向国家市场监督总局备案了一项召回计划,将扩大EQA、EQB和EQC三款纯电车型的召回范围。
北京奔驰
EQA
EQB
EQC
召回
润物细无声,特斯拉为何在中国“痴迷”于建设家充+超充网络?
对于一家新能源汽车企业来说,充电网络犹如人体内的毛细血管,有不可或缺的作用,但也非常“脆弱”,需要时刻呵护以及大量的投入与付出。
特斯拉
充电
市场
岚图FREE将推送2.0版本OTA升级 新增三个场景模式/多项功能优化
近日岚图汽车官方宣布,将从9月20日起为岚图FREE推送全新的OTA升级,系统将更新至2.0版本,据悉将针对141项功能进行升级,并新增多项服务功能。
岚图FREE
OTA
升级
岚图汽车
蔚来在欧洲制造的首个换电站下线 将运往德国实装
近日蔚来官方宣布,其在欧洲“量产”的首座换电站已经在匈牙利的蔚来能源工厂正式下线,并发往德国进行落地实装
蔚来
换电站
欧洲
德国
蔚来发布宇航蓝Airspace Blue车身颜色,未锁单用户可改色选装!
大家越来越重视的选车要素中,车身颜色已经成为非常重要的一项。
蔚来
App
福特新一代BlueCruise驾驶辅助系统正式发布,Mustang Mach-E将率先搭载!
此次,升级至1.2版本的BlueCruise驾驶辅助系统包括三大功能亮点。
福特
BlueCruise
手拿把攥,稳得一匹 理想汽车操控与驾驶辅助初体验
我发现理想L9在处理这些情况时,就像有只“无形的大手”,以上帝视角让车辆能够随时保持“稳定”。
理想
L9
智能驾驶
安全
从发布到交付仅需51天 AITO问界M7以“闪电自信”迎接市场检验
8月24日,赛力斯集团旗下品牌AITO汽车的全新车型问界M7在重庆、深圳两地同时启动首批新车交付工作,并宣布将陆续开启全国交付。
AITO汽车
问界M7
新车
交付
在宜商宜家的路上 岚图梦想家做对了什么?
来自东风集团旗下的岚图汽车,这个志在高端豪华的电动汽车品牌所推出的第二款量产车型,就是定位于中大型MPV的梦想家,而这款新车也的确展现了岚图对于电动豪华旗舰MPV的理解。
岚图
梦想家
电动MPV
浅析 | 东风日产「启辰DD-i超混动」系统
「启辰DD-i」的技术逻辑就是:多用电、少用油、纯电优先、高效用油!
启辰DD-i
混动技术
混动
东风日产启辰
东风日产
阿维塔12电池首秀!宁德时代『下潜』电池、华为液冷超充强势助力
阿维塔12就公布搭载了宁德时代与其深度合作打造的『下潜』式电池设计,官方号称『百万内唯一,世界唯二』。
阿维塔
阿维塔12
综合续航1343km,17.28万元起,星途瑶光C-DM正式开启预售
2月26日,星途瑶光C-DM正式宣布开启预售,预售指导价为17.28-22.28万元,新车是基于星途M3X超混平台打造的首款车型,定位中型SUV。
星途
瑶光C-DM
干货 | 一篇看懂「东风马赫电混DH-i」的混动专用变速器
又一款多挡位的混动系统,4个挡位到底如何变速?功率分流+串并联如何结合?
皓瀚DH-i
马赫电混
DH-i
浅谈 | 比亚迪「璇玑架构」到底有何『玄机』?
或许「璇玑架构」是比亚迪整车智能技术的大整合,亦是其智能化的总方向
比亚迪
比亚迪仰望
璇玑架构
专为中国新能源商用车研发!五菱红1号电池正式发布
五菱红1号电池采用MUST超轻薄结构技术,厚度仅为148mm,是业内最薄的商用车电池,更大程度为货箱载货空间让利,将在安全、体验和性能上,引领新能源商用车行业转型。
上汽通用
五菱
红1号电池
高合HiPhi Y全新OTA,近百项升级优化只为更好服务用户
我们期待更全能的HiPhi Y可以借此机会,实现一波销量爆发。
高合HiPhi
HiPhi
Y
OTA升级
面向全球,双动力并行,M3X超混平台引领星途向上突破
这款M3X超混平台的动力架构部分,主要采用的就是“双电机+3挡DHT”组合。那么在竞争如此激烈的环境里,这样一个“新兵”会有怎样的竞争力呢?
奇瑞
星途
瑶光
智能电动化时代,ID.家族以安全演绎「车之道,为大众」
在一汽大众ID.7 VIZZION正式上市的前一天,我们来到了「大众汽车ID. GO安全实验室」,看了看大众在ID.家族身上如何打造“六边形安全”。
大众
ID.7
VIZZION
安全
技术
智能
极氪发布自研「金砖电池」,进一步填充800V版图
极氪全栈自研的「金砖电池」,这也是全球首款量产的800V磷酸铁锂超快充电池。目前「金砖电池」已经正式量产下线,并将在12月27日正式上市的极氪007上进行首发搭载。
极氪
极氪007
金砖电池
深蓝汽车|混动的天花板是深蓝超级增程,广州车展发布引热议
深蓝汽车携旗下重磅车型SL03i、S7i,亮相第21 届广州国际汽车展览会,并发布深蓝超级增程技术。
深蓝超级增程技术
深蓝SL03
深蓝S7
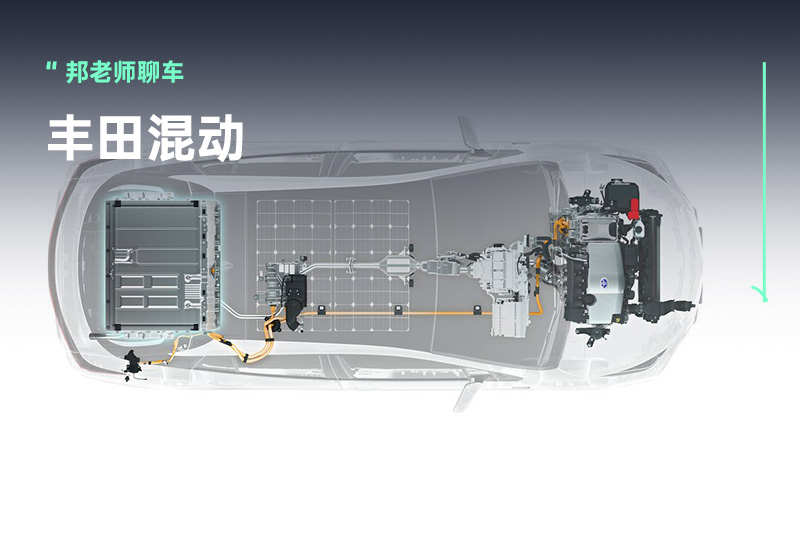
未来五年,到底谁才是全球的混动一哥?
有这么一套混动系统,今年已有26岁,在中国的18载,累计销售2,500,000套,其恐怖的市占率,使其很长一段时间内成为了妇孺皆知的混动首选。
丰田混动
丰田双擎
混动技术
混动百科
ID.7 VIZZION:在不确定的世界里探索更多安全感
全方位的安全守护,让ID.7 VIZZION成为ID.家族的安全新旗舰,不仅有全面的安全功能加持,还有大众品牌和ID.家族的赋能,以全维安全带领一汽-大众ID.系列进入2.0时代。
一汽-大众
ID.7
VIZZION
安全
同样都是AEB,阿维塔11为何能带“G”?
这次获得中国汽研IVISTA中国智能汽车指数评价综合五星,阿维塔11只是小试牛刀,我们相信它还能经受更多消费者的检验。
阿维塔
阿维塔11
GAEB
干货 | 一篇看懂「上汽DMH」的混动专用变速器
没废话,纯干货,只为你看懂~~
上汽荣威
荣威D7
上汽混动
混动
五菱灵犀混动×神炼电池,星光下的技术五菱信赖向前
『上汽通用五菱技术进化日』发布的全新原生新能源架构,其中主要包含「五菱灵犀混动」和「神炼电池」两大自研核心技术。
五菱
五菱灵犀混动
神炼电池
五菱混动
混动
混动系统
或将首搭AMD V2000芯片,smart探索未来都市交通最佳解决方案
smart是在全球研发体系的加持下,打造有温度的科技产品。
smart
精灵
比『公路坦克』更安全?揭秘「极氪式安全」
15万辆零自燃,极氪式安全值得我们思考。
极氪
极氪001
极氪009
极氪X
不搞『空头支票』,哪吒发布「滑板底盘」等五大现货技术
近日,哪吒汽车也发布了「浩智技术品牌2.0」,一口气对外放出了五张王牌,涉及智舱、智驾、三电等多个核心领域,并且都已经是「技术现货」。
哪吒
浩智
兼顾性能与舒适的细腻,才是全新蔚来ES8的「高级感」
润物无声的兼顾舒适和性能,这才是全新蔚来ES8的价值所在
蔚来
ES8
底盘
智能
别克微蓝全系调整补贴后售价
4月1日,别克官方调整了旗下微蓝6与微蓝7全部车型的售价。据悉,此轮售价调整并未对厂商指导价进行修改,而是根据2022国家补贴标准,调整了综合补贴后售价。
别克
微蓝6
微蓝7
深圳推出“以旧换新”购车政策 置换新能源汽车可获5000元补贴
深圳市商务局即日起推出“以旧换新”汽车购置奖励政策,粤B车主通过“以旧换新”方式购车将可获得3000至5000元不等的补贴,其中置换新能源汽车可获得最高一档的5000元补贴
以旧换新
深圳地方补贴
深圳纯电车主2022年1月1日起无法参与粤B蓝牌摇号和竞拍
自2022年1月1日起,深圳地区名下有车的个人无法申请普通小汽车增量指标和混动小汽车指标,只能申请纯电动小汽车指标。
燃油车指标
深圳车牌
国家多部委联合发布《促进绿色消费实施方案》 大力发展新能源车市场
1月21日,国家发展改革委、工业和信息化部、商务部等7大部委联合发布《促进绿色消费实施方案》,全面推动绿色消费,以此贯彻落实国家“碳达峰”、“碳中和”战略规划。
发改委
绿色消费
新能源车
市场
政策
公告|第十七届趴趴趴大赛将延期举行
原定于2022年1月15日在北京举行的第十七届趴趴趴大赛将延期举行,时间调整安排将另行通知。
趴趴趴大赛
趴趴趴大赛延期
广东:逐步放宽广州、深圳汽车上牌指标限制,大力推广节能车新能源车
广东省人民政府网站日前消息,广东省人民政府办公厅印发《关于促进城市消费若干政策措施的通知》,表示逐步放宽广州、深圳汽车上牌指标限制,释放消费需求。
汽车政策
新能源车
工信部发布指导意见:要求提高动力电池安全水平
日前,工信部发布的《关于进一步加强新能源汽车安全体系建设的指导意见》(征求意见稿)明确,要提高动力电池安全水平。
工信部
电池安全
最高奖励1万元 海南新能源汽车消费奖励措施延续到年底
日前,编者从海南省新能源汽车推广应用工作联席会议办公室获悉,为进一步促进新能源汽车消费,海南将2021年促进新能源汽车消费综合奖励措施延续到2021年12月31日,不限定奖励总量。
新能源汽车
海南
为加快新能源发展 多地出台充换电基础设施相关政策
为加快新能源发展,近一个月内,多地出台充换电基础设施相关政策。
新能源汽车
充换电
中国新能源车成本依然偏高!工信部将提高保障能力
今年以来动力电池及原材料不断上涨,新能源厂家纷纷收紧销售渠道的优惠政策,消费者购买新能源车的费用也所以增加,而厂家的盈利能力却下降了,显然这并不是一个良性循环。
新能源汽车
工信部
开电动车上高速不花钱 俄罗斯颁布刺激电车新举措
8月23日,俄罗斯总理米舒斯京(Mikhail Mishustin)签署了一项刺激电动车销量的新举措——驾驶纯电汽车可免费通行收费公路。
海外新闻
俄罗斯
电动转型难,捷克拒绝欧盟2035年内燃机汽车禁令
一些业内人士坚持认为,捷克向电动汽车转型,是一场危机与机遇并存的挑战。
捷克
电动化
上海将出台支持燃料电池汽车发展政策:四年内建设加氢站100座
日前,上海市发改委副主任裘文进上海市政府新闻发布会上表示,上海将尽快印发《关于本市支持燃料电池汽车产业发展若干政策》。
燃料电池
氢燃料
拨约60亿日元专款,日本政府推L4级自动驾驶项目
据外媒报道,日本于当地时间9月8日正式推出一个全新的自动驾驶项目“Road to the L4”。
自动驾驶
L4级
防止汽车芯片市场哄抬炒作,国家市场监管总局加大调查力度
从去年底到今年年中,汽车芯片价格上涨了几十倍、甚至上百倍。从今年6月开始,汽车芯片价格维持高位,不再上涨,但总体上需求依然很紧。
汽车芯片
市场监管
商务部、公安部、税务总局:加快推进二手车异地交易登记跨省通办
日前,商务部发布消息称,商务部、公安部、税务总局加快推进二手车异地交易登记跨省通办。
商务部
二手车
日本:2030年将全国电动车充电站数量增加到15万个
未来,日本的目标是:到2030年,将全国范围内的电动车充电站数量增加到15万个。
电动车
充电桩
交通部:网约车覆盖超300座城市、日均订单2000万单
日前,交通运输部在2021年8月份例行新闻发布会上,对网约车合规化的进展和成效进行了通报。
网约车
交通部
俄罗斯政府批准电动车发展战略,计划2030年产量占比达10%
近日,俄罗斯政府批准了一项电动车发展战略,计划到2030年底,其电动汽车产量达到整体汽车产量的10%。
俄罗斯
电动车
印度财政部长:对讨论修改汽车税率持开放态度
印度财政部长在8月25日表示,该国对讨论修改汽车税率持开放态度。这表明,面对汽车制造商长期以来提出的降低税率的谈判要求,印度持接受态度。
汽车税率
马鲁蒂铃木
3月新能源车企销量遍地开花,比亚迪月销30万+继续霸榜
不出意外的是,在前十榜单中,比亚迪3月份的销量能抵其他车企的总和
比亚迪
新能源
新BaaS+新电池+新品牌,蔚来构建商业版图“二期工程”
蔚来正在构建商业版图“二期工程”,盈利指日可待
蔚来
电池
BaaS
向新、向上、向发展,东风2024再进击
一直将“勇争第一、当好国家队”作为使命任务的东风汽车,近些年在新能源转型升级阶段取得突破性进展。
东风汽车
新能源转型
奇瑞发大招:iCAR 03起售价10.98万,纯电SUV比油车更便宜
年轻人的车,有年轻的价
奇瑞
年轻人的车
iCAR
iCAR
03
开年第一周,比亚迪领衔『大乱斗』,价格战再升级!
很明显,贾玲选择在大年初一惊艳众人,比亚迪则要在大年初十惊呆对手。
比亚迪
比亚迪秦
2023新势力销量盘点,谁的「得分效率」最高?
这一年车企最佳状态,应该是以尽量精简的「产品阵容」,赢得尽量多的「销量」。这其实考验的是大家对市场需求的洞察精准度,也就是把握机会的能力。
理想
埃安
蔚来
零跑
小鹏
腾势
哪吒
极氪
深耕中国二十年,东风日产2024全面加速电驱化转型
在刚刚过去的2023年,不断向新能源转型的东风日产给市场交出的一份满意的答卷。
东风日产
电驱化
1003天投入百亿资金,小米造车都做了什么?
这次小米汽车用技术「交朋友」
小米
雷军
新势力
小米SU7
高合汽车在挪威携手知名合作伙伴加速市场布局
据挪威媒体BilNytt.no最新的报道,高合汽车在挪威市场的合作伙伴包括欧洲售后市场领头羊MEKO和北欧地区售后及维修服务商Werksta,以及欧洲最大的商业银行之一桑坦德银行S
高合汽车
挪威
ID.7正式上市 做真正的长期主义者
一汽-大众ID.7 VIZZION起步价格下探至22万元,比之前的预售下调了1万元,并推出了总价值2万左右的7重购车大礼
一汽-大众
ID.7
新世代主流车企没落了?丰田说绝不
期待掌握“时代密码”的丰田变“丰电”,再战下个百年。
丰田
一汽丰田
广汽丰田
王传福亲手交车!比亚迪高管天团共鉴豹5全国交付开启
11月23日,比亚迪集团董事长兼总裁王传福,亲手将豹5交付给了全国首批车主。
比亚迪
方程豹
“带电”的躁梦节,映射广汽本田电动化的迅猛势头
广汽本田躁梦节,是以车主&粉丝为中心的盛大节日和圆梦舞台。
广汽本田
新能源
极星4将集成搭载Luminar激光雷达与Mobileye Chauffeur自动驾驶技术
本次合作通过集成Luminar的下一代激光雷达技术和Mobileye Chauffeur™智能驾驶平台,从而增强极星4的安全性和未来智能驾驶能力。
极星4
Luminar
激光雷达
只有奥迪能告诉你,汽车的终极乐趣是什么
如此奥迪,怎能不爱
奥迪
e-tron
技术
赛车运动
RS
e-tron
GT
Q4
e-tron
对于未来出行,BBA玩虚拟,日系玩现实
不管名字是什么,它们的作用都是一样的:告诉大家,车企打算在不久的将来,为我们提供怎样的出行工具。
日本移动出行展
东京车展
丰田
日产
斯巴鲁
本田
风阻系数名列前茅,星途星纪元ES引领纯电轿车新变革
这也让星纪元ES完全有资格进入全球量产车型风阻系数的第一梯队,成为纯电轿车空气动力学研发的标杆之一。
星途
星纪元ES
新车
风阻系数
长安启源A07超懂交流AI管家,真智能天花板
从硬件到软件,我们来看看它是如何通过“四真”成功实现了数智进化。
长安启源
长安启源A07
毫末努了努力,把“无图智驾”给打到千元级别了
一转眼,HAOMO AI DAY已经来到了第九届,这次的发布会和以前一样信息量极大。
毫末
无图智驾
不只是纯电动力,一汽奥迪打造极致可持续出行
奥迪在控制碳排放以及可持续发展方面不仅起步早,而且从源头开始,贯彻整个链条,直到人们驾车出行,甚至考虑到了产品生命周期末尾的回收再生问题。
一汽奥迪
e-tron
GT
查看更多内容
没有更多了
大家都在看
周
月
.1
7.98万元起,长安启源A05/Q05真香版上市,最大综合续航达1300km!
.2
理想『高铁』之后,LEVC又推『空客』,纯电MPV你就卷吧
.3
15.49万元起,新款smart精灵#1及#3上市,400km版本值不值得入手?
.4
全新天舆架构发布,宝骏悦也PLUS加入悦也家族
.5
从智界S7看华为不造车:越做越明白
.1
7.98万元起,长安启源A05/Q05真香版上市,最大综合续航达1300km!
.2
蟹行模式、固态电池、无图智驾!预售23万元起智己L6『重装』入场
.3
纯电Macan将于北京车展正式上市,『触电』后的惊喜值得期待
.4
将诚意进行到底,全新腾势N7上市23.98万起
.5
理想『高铁』之后,LEVC又推『空客』,纯电MPV你就卷吧
最新视频
更多
不到20万,始于颜值,忠于性能—东风奕派eπ007
舞动起来的红旗,还是你印象中的红旗吗
本田大法好?极湃2不堆配置照样好开!
领克07EM-P|重新定义20万级混动家轿
又一款带电『方盒子』,试驾捷途山海T2
热门关注